وسایل الکترونیکی انرژی موردنیاز خود را از دو طریق تامین میکنند: باتریها و مبدلها. باتریها انرژی را بهصورت داخلی ذخیره میکنند، اما آنها اغلب سنگین هستند و تامین انرژی محدودی دارند. مبدلهای برقی، مانند پنلهای خورشیدی، انرژی را از محیط اطراف جمعآوری میکنند. این مبدلها هرچند برخی از نقاط ضعف باتریها را ندارند، اما خودشان مشکلات جدیدی را معرفی کردهاند؛ از جمله اینکه آنها فقط تحت شرایط خاصی میتوانند عمل کنند و نمیتوانند انرژی را خیلی سریع به برق تبدیل کنند.
حالا تحقیق جدیدی در دانشکده مهندسی و علوم کاربردی دانشگاه پنسیلوانیا انجام شده که برای اولین بار خلا بین این دو فناوری را در شکل یک “زبالهخوار فلز-هوا” (metal-air scavenger) پر کرده است.
این زبالهخوار فلز-هوا، از یک طرف، مانند یک باتری کار میکند و با شکستن و تشکیل متناوب پیوندهای شیمیایی انرژی تولید میکند. از طرفی هم مثل یک مبدل عمل کرده و انرژی موردنیاز خود را از محیط اطراف میگیرد. این انرژی مشخصا از پیوندهای شیمیایی درون فلز و هوای اطراف زبالهخوار تامین میشود.

نتیجه کار، نوعی منبع انرژی است که ۱۰ برابر دانسیته انرژی بیشتری نسبت به بهترین مبدلهای برقی و ۱۳ برابر دانسیته انرژی بیشتری نسبت به باتریهای لیتیوم یون دارد.
این نوع منبع انرژی در طولانی مدت میتواند تبدیل به پایه و اساسی برای یک پارادایم جدید در صنعت رباتیک شود؛ پارادایمی که در آن، رباتها انرژی خود را با پیدا کردن و خوردن فلزات تامین خواهند کرد و پیوندهای شیمیایی این فلزات را برای تامین انرژی خواهند شکست؛ درست مانند بدن ما انسانها که غذا را به واحدهای کوچکتر میشکند.
این تکنولوژی در کوتاهمدت میتواند انرژی برخی از محصولات شرکتهای دانشبنیان را تامین کند. امسال برندگان اول و دوم رقابتهای سالانه Y-Prize دانشگاه پنسیلوانیا، تصمیم دارند از زبالهخوارهای فلز-هوا برای تامین انرژی خانههای خارج از شبکه برقرسانی در کشورهای در حال توسعه و همچنین در ساخت سنسورهای بادوام برای کانتینرهای باربری جهت شناسایی مواردی مانند دزدی، خسارت یا حتی قاچاق انسان استفاده کنند.
محققان این تکنولوژی، نتایج مطالعات خود درباره قابلیتهای زبالهخوار فلز-هوا را در مجله ACS Energy Letters به چاپ رساندهاند. اما دلیل توسعه چنین دستگاهی این بود که فناوریهای ساخت مغز رباتها و تکنولوژیهایی که انرژی آنها را تامین میکنند، معمولا در مقیاسهای مینیاتوری انطباق چندانی باهم ندارند.
همانطور که میدانید هرچه ابعاد ترانزیستورها کاهش یابد، چیپها قدرت محاسباتی بیشتری را در ساختارهای کوچکتر و سبکتر فراهم خواهند ساخت. اما این موضوع در مورد باتریها صادق نیست. علت آن هم این است که چگالی پیوندهای شیمیایی یک ماده همیشه ثابت است، بنابراین باتریهای کوچکتر به معنای وجود پیوندهای کمتر برای شکستن خواهد بود.
James Pikul از اعضای گروه تحقیق میگوید: این رابطه معکوس بین عملکرد محاسباتی و ذخیره انرژی، امکان عملیات دستگاههای کوچکمقیاس و رباتها در طولانیمدت را بسیار دشوار میکند. رباتهایی به اندازه حشرات وجود دارند، اما باتری آنها فقط میتواند به مدت یک دقیقه دوام بیاورد.
موضوع بدتر اینکه حتی اضافه کردن یک باتری بزرگتر هم به ربات اجازه نخواهد داد تا مدت زمان بیشتری دوام بیاورد؛ برای اینکه وزن اضافهشده، انرژی بیشتری برای حرکت نیاز خواهد داشت و این کار، انرژی اضافی ناشی از باتری بزرگتر را خنثی خواهد کرد. تنها راه برای غلبه بر این رابطه معکوس، جستجوی پیوندهای شیمیایی توسط خود ربات است و نه حمل آنها.
Pikul میگوید: مبدلهای برقی که انرژی خورشیدی، گرمایی یا ارتعاشی را جمعآوری میکنند در حال بهتر شدن هستند. آنها اغلب برای تامین انرژی سنسورها و وسایل الکترونیکی که خارج از شبکه هستند یا امکان تعویض باتری آنها وجود ندارند استفاده میشوند. مشکل آنها این است که دانسیته انرژی پایینی دارند و نمیتوانند مانند باتریها انرژی را بهسرعت از محیط بگیرند. دانسیته انرژی زبالهخوار فلز-هوا ما ۱۰ برابر بیشتر از چگالی انرژی بهترین مبدلهاست و از این بابت قابلیت رقابت با باتریها را دارد. این دستگاه از شیمی باتری استفاده میکند، اما وزن زیادی ندارد، برای اینکه مواد شیمیایی را از محیط میگیرد.
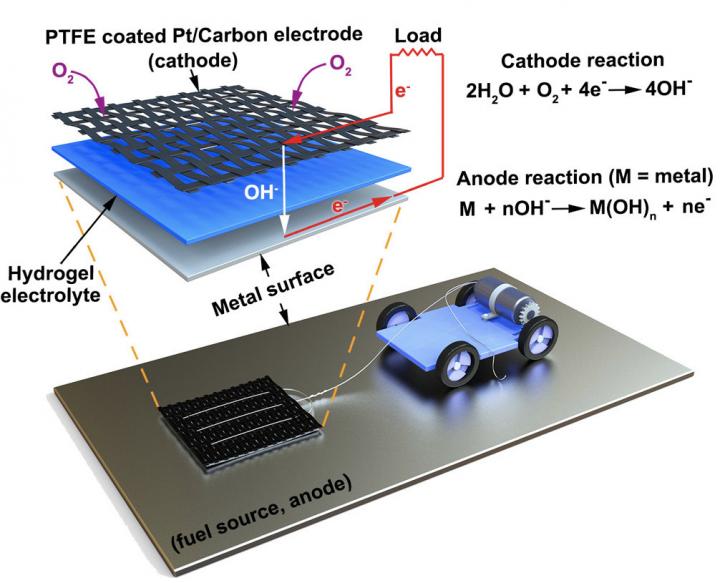
زبالهخوار طراحیشده توسط محققان دانشگاه پنسیلوانیا، درست مثل باتریهای معمولی، کار خود را با یک کاتد که به دستگاه مصرفکننده انرژی وصل شده شروع میکند. زیر این کاتد یک ورقه هیدروژل (یک شبکه اسفنجی از زنجیرههای پلیمری برای هدایت الکترونها بین سطح فلز و کاتد از طریق مولکولهای آب) قرار دارد. این ورقه هیدروژل بهعنوان یک الکترولیت عمل کرده و با تماس هر سطح فلزی، آن سطح را تبدیل به یک آند میکند. این کار اجازه میدهد تا الکترونها به سمت کاتد جریان یابند و انرژی دستگاه وصلشده را تامین کنند.
تیم تحقیق، برای اهداف مطالعه خود، یک وسیله موتوری کوچک را به زبالهخوار وصل کردند. زبالهخوار با کشیدن لایه هیدروژل پشت خود، شروع به اکسید کردن سطوح فلزی مسیر خود کرد و یک لایه میکروسکوپی از اکسید را پشت سرش به جای گذاشت.
اعضای گروه، برای اثبات کردن کارآیی این روش، زبالهخوار خود را در دایرههایی روی یک سطح آلومینیومی به حرکت درآوردند. دستگاه به یک مخزن کوچک مجهز شد که بهطور مداوم آب را به داخل هیدروژل تزریق میکرد تا مانع از خشک شدن آن شود.

Pikul میگوید: دانسیته انرژی، نسبتی از انرژی قابلدسترس برای وسیلهای است که قرار است حمل شود. حتی با چشمپوشی از وزن آب اضافه، زبالهخوار ما ۱۳ برابر دانسیته بیشتری نسبت به یک باتری لیتیوم یون دارد. دلیل آن هم این است که وسیله ما تنها باید هیدروژل و کاتد را حمل کند و نه فلز و اکسیژنی که انرژی آن را تامین میکنند.
تیم تحقیق زبالهخوار خود را روی سطوح زینک و و فولاد ضدزنگ هم تست کردند. فلزات مختلف، بسته به توانایی اکسیدکردنشان، دانسیتههای انرژی متفاوتی را به زبالهخوار میدادند. واکنش اکسیداسیون، تنها در فاصله ۱۰۰ میکرونی از سطح فلز انجام میگیرد؛ بنابراین با اینکه زبالهخوار ممکن است همه پیوندهای قابلدسترس را استفاده کند، اما احتمال کمی وجود دارد که این کار آسیب جدی به ساختار فلز وارد کند.
سیستم زبالهخوار جدید، کاربردهای احتمالی زیادی خواهد داشت. این فناوری امسال در رقابتهای Y-Prize دانشگاه پنسیلوانیا دو جایزه برد. یکی از تیمها به نام Metal Light بهخاطر پیشنهاد استفاده از تکنولوژی زبالهخوار فلز-هوا در تامین انرژی خانههای خارج از شبکه برقرسانی در جایگاه نخست قرار گرفت و جایزه ۱۰ هزار دلاری مسابقه را برنده شد و تیم M-Squared هم که پیشنهاد استفاده از سنسورهای مجهز به این زبالهخوار را در کانتینرهای باربری داده بود با دریافت جایزه ۴ هزار دلاری در رتبه دوم قرار گرفت.
Pikul میگوید: ما در کوتاهمدت انتظار داریم شاهد فناوریهای اینترنت اشیا مبتنی بر زبالهخوار فلز-هوا باشیم؛ مشابه چیزی که تیمهای Metal Light و M-Squared پیشنهاد دادند. اما آنچه که برای ما بسیار هیجانانگیز بود و انگیزهمان را برای ادامه کار بیشتر میکرد این بود که فناوری جدید چگونه طراحی رباتها را تغییر خواهد داد.
اکثر کارهای پژوهشی Pikul مربوط به بهبود فناوریها با الهام گرفتن از طبیعت میشوند. برای مثال، او یک نوع “چوب فلزی” بسیار مقاوم با دانسیته پایین طراحی کرده که ایده آن را ساختار سلولی درختان الهام گرفته است.
تیم تحقیق، فناوری زبالهخوار خود را از یک ایده بیولوژیکی بسیار بنیادین یعنی خوردن غذا گرفتهاند. Pikul میگوید: با هوشمندتر و توانمندتر شدن رباتها، ما دیگر نباید خودمان را محدود به وصل کردن مستقیم آنها به برق کنیم. آنها حالا مثل انسانها میتوانند منابع انرژی موردنیازشان را خودشان پیدا کنند. زمانی فرا خواهد رسید که یک ربات که برای شارژ باتریهای خود فقط نیاز به پیدا کردن کمی آلومینیوم برای خوردن خواهد داشت تا از این طریق، انرژی کافی برای انجام کارهای خود تا وعده غذایی بعدی را به دست آورد.
تحقیق حاضر توسط اداره تحقیقات نیروی دریایی آمریکا حمایت مالی شده و در مرکز نانوتکنولوژی Singh انجام گردیده است.